Introduction
One of the new “minor features” in betaflight that I’m very excited about is throttle limit. Previously throttle limit could only be done through your transmitter software and is a pig to set up and even if you could set up it is difficult to flick between option.
For the first time this can be set up in Betaflight with the release of 3.4.0. I’ll cover only one type of throttle limit here that will most commonly be used and how to assign varying limits and rates to a transmitter switch. I’ve put this tutorial together because the throttle limit feature must be accessed through the command line interface (CLI) rather than the graphical user interface (GUI)
Firstly if you have played with rate profiles in betaflight before, this is what your the throttle limits are tied to. You can cycle through these with the betaflight OSD when disarmed or if you assign to switches you can change mid flight.
Why would I want to limit throttle?
There are a few reasons that are all based around the fact that lmiting throttle will limit current drawn and so limit max RPM and thrust.
- Longer flight. Assuming you hit 100% throttle on you transmitter at time you’ll use less power and so get longer flight. This is often a trick used by racers on particular tracks where battery life is critical
- Less vibration. Depending on the age of motors and props, limiting max throttle will limit motor output. If you motors or props are slightly unbalanced, this will limit their impact. I find this useful on my micro brushless quads with questionable motors
- Less peak thrust. This is a good one for beginners. On 5″ quads where 4s is generally the norm, beginners can limit thrust to make it behave like a 3s in terms of performance. That way you don’t have to buy 3s batteries which are rapidly becoming obsolete in this size.
- More gentle on batteries and electronics. It is large current loads that tend to be damaging to electrical systems. For batteries in particular limiting throttle will limit current draw and may mean longer service life of your battery.
It’s important to note that your flight controller still has full access to 100% of your throttle meaning that there will be overhead to speed up motors to perform maneuvers and corrections rather than slowing down saturated motors.
How do I do it? Easy.
First, choose the rate profile you’d like to limit throttle on, up to 6 are available in betaflight now but I only use 3 since I map to a 3 way switch on my transmitter. In the example below I have my ‘race rates’ on profile 1 and 2 which are identical and use profile 2 for limiting throttle. FYI profile 3 is my freestyle rates. Make sure you press ‘save’.

Next go into the CLI mode. type or copy and paste as below:
set throttle_limit_type = scale
set throttle_limit_percent = 85
save
In this example the throttle _limit_type is scale where it creates a linnear throttle curve up to the throttle_limit_percent value. In this case the throttle will linnearly increase to 85% at max throttle on your transmitter.
If you wish to turn throttle limiting off again, use:
set throttle_limit_type = off
save
Lastly there is a second throttle limit type “clip” which simply makes the throttle stick have no impact over a set percentage. I think it will only be exceptional case where someone might use this, particularly playing practical jokes on your mates when you have access to their quad.
To confirm that your throttle limit settings have stuck you can see in you CLI “diff” as below:
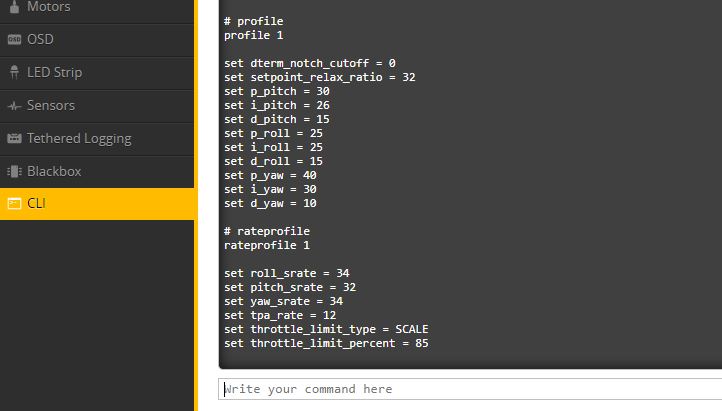
As per the example I used, my rate profile 2 (shown here as rate profile 1 since betaflight uses n-1 naming) has throttle limiting as scale limited to 85% maximum.
Setting it to a switch
The real usefulness comes in when you set to a switch so I’ve taken a screen grab to best illustrate – click to embidden. In this same example
- rate profile 1 = race rates with access to 100% throttle.
- rate profile 2 = race rates with access to 85% throttle.
- rate profile 3 = freestyle rates with access to 100% throttle.
Flick the 3 way aux switch will have rate profile 1 in the ‘up’ position, 2 in the ‘mid’ position and 3 in the ‘low’ position. I use this across ALL of my brushless quads: 2″, 2.5″, 3″, 4″, 5″, 6″. Now that betaflight has 6 profiles you can get creative and map to a potentiometer or whatever else smokes your tires.

Conclusion
In practice this works well for me on quads with older motors that either vibrate or prop/motor combinations that don’t practically put out any more thrust after a certain amount of throttle, rather they just draw more current. I do really like the new filtering of the newly released 3.4.0 but for me throttle limiting is one of the most underrated features in this release which I expect to see in all subsequent releases too.
Reference
The original betaflight throttle limit pull request can be found here:
https://github.com/betaflight/betaflight/pull/5608
This article has been re-posted with permission by the author from QuadifyRC.com. Please visit to see more tips, tricks, modifications and reviews where I specialise in micro brushless quadcopters with a few 5″ racers and whoops thrown in for good measure

{kind=link}
{kind=link}
{kind=link}
{kind=link}