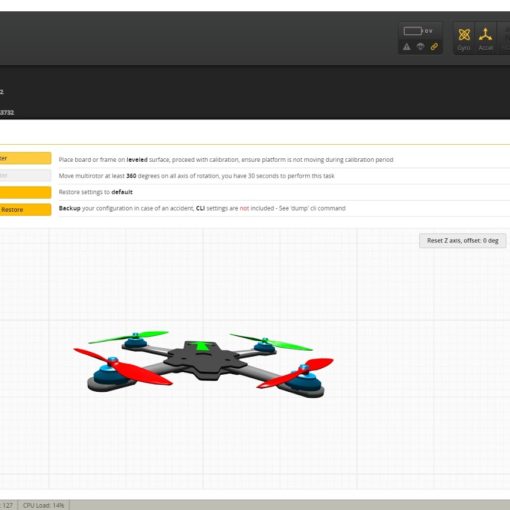
If you haven’t already, connect the flight controller to your PC with your USB cable and select the Setup tab from the menu on the left. There is very little to do on the Setup tab.
First, place the quadcopter on a flat, level surface and ensure it isn’t moving. This can be harder than it sounds with today’s ultralight micro quads as the USB cable sometimes outweighs the quad.
Once the quad is flat and level, click the “Calibrate Accelerometer” button. Wait a few seconds until the message window indicates calibration is complete.
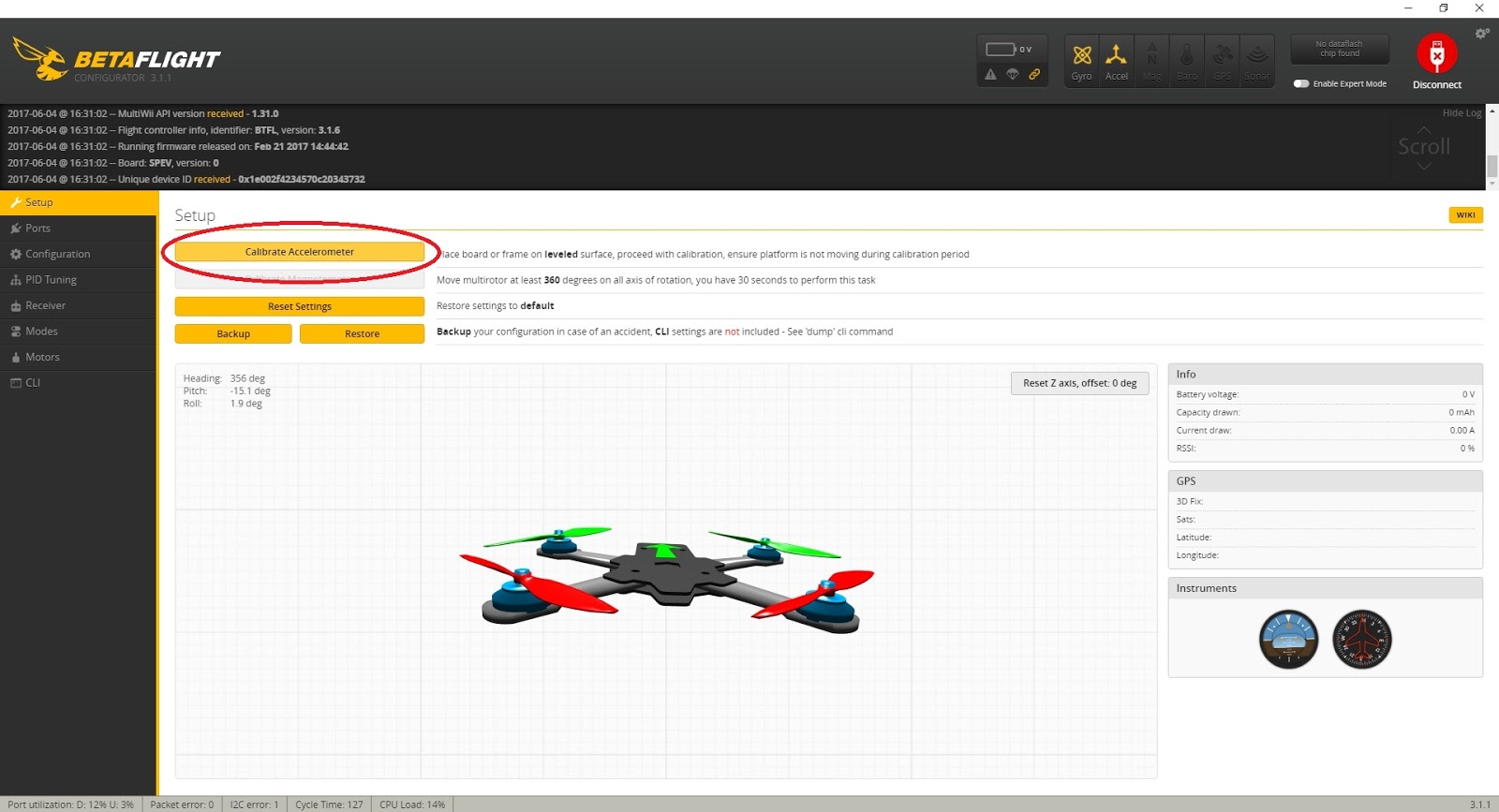
Now check the quad motion along all three axes. Move the board around while watching the 3D image in the screen. The large green arrow on the 3D model indicates the front of the quad but don’t worry if that’s not facing the same way as your actual quad. All that matters is that movements are on the same axes.
When you pitch the quad forward, the 3D model should pitch forward. Check yaw and roll similarly. If the quad exhibits odd movement (for example, it rolls when it should yaw), then you may have the board alignment setting incorrect on the Configuration tab. That will be addressed in Step 6.
{kind=link}
{kind=link}
{kind=link}
{kind=link}