
This guide is intended for anyone new to setting up quadcopter flight controllers using the Betaflight firmware and configurator. It is not intended as a guide for experienced users but will instead give new users instructions on the basic, bare-bones setup steps that will just get your quad up in the air and flying smoothly. It contains only the bare minimum steps. For the vast majority of pilots, this is all you need to do.
Let’s start with why a bare-bones guide is necessary. Simply put, Betaflight is an absolutely amazing open-source flight controller firmware that is packed full of incredible features and options. It is constantly being updated and allows users to do miraculous things with their flight controllers. But most of these features are not needed if you just want a solid, stable, great-flying quad. The challenge for a new user, however, is that it’s difficult to know which features are necessary, and which are optional. With all the data and information available, a new user can easily get overwhelmed by tabs and tabs of sliders and buttons that he doesn’t really need to touch.
So this guide will just focus on the basics needed to get a quad in the air. And the quad is almost guaranteed to fly great with just the basic settings.
Specifically, this guide will cover:
- Installing the Betaflight configurator on a Windows-based PC.
- Installing the proper drivers so the Betaflight configurator can communicate with your flight controller.
- Ensuring the Betaflight firmware is already installed on your flight controller.
- Calibrating the accelerometer via the Setup tab.
- Setting receiver communication via the Ports tab.
- Setting up the Configuration of your flight controller
- ESC/Motor protocol
- Setting up your SBUS receiver
- Board alignment (rarely needed)
- Setting up your Receiver
- Channel mapping
- Switch mapping
- Endpoints and center points
- Setting up Modes, using two switches
- Arm/Disarm
- Flight Modes
- Calibrating your ESCs
- Summary and customizing your setup
Things this guide will NOT cover (because they are NOT mandatory for a great-flying quad):
- OSD
- Telemetry
- PIDs (the default Betaflight PIDs are fine for a new pilot)
- Rates (the default Betaflight rates are fine for a new pilot)
- Current/voltage monitoring
- Gyro and PID loop frequency
- Blackbox
- LEDs
- Beepers/buzzers
- Failsafe (Because Betaflight’s default Failsafe settings are already what you want)
- Airmode (discussed in the summary)
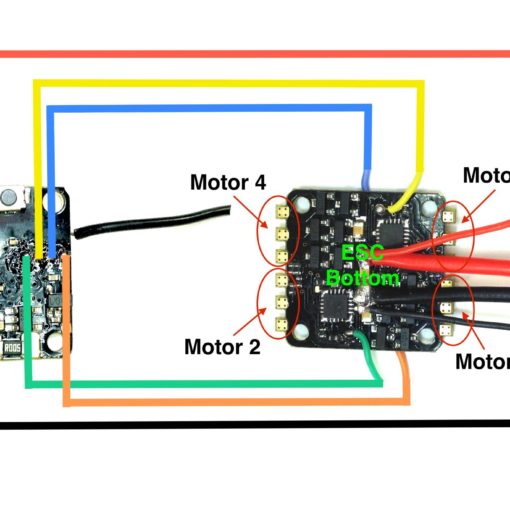
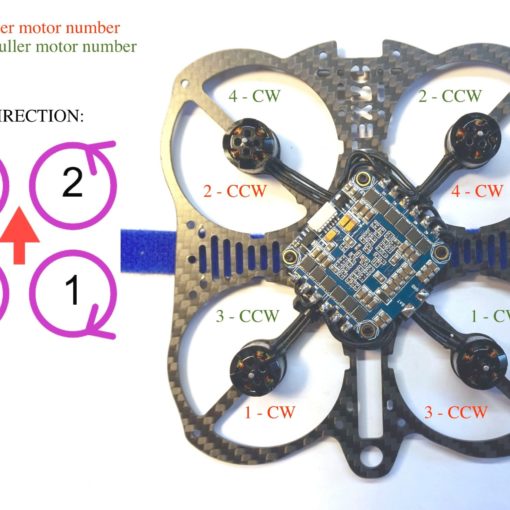
- Reversing motor directions (because this is specific to the ESCs you are using and not a Betaflight function)
- Flashing Betaflight firmware (because most flight controllers come with Betaflight installed already and, if not, the flashing process is specific to that flight controller)
This guide assumes the following:
- The flight controller has the Betaflight firmware installed. If it doesn’t, refer to the flight controller’s documentation for flashing firmware.
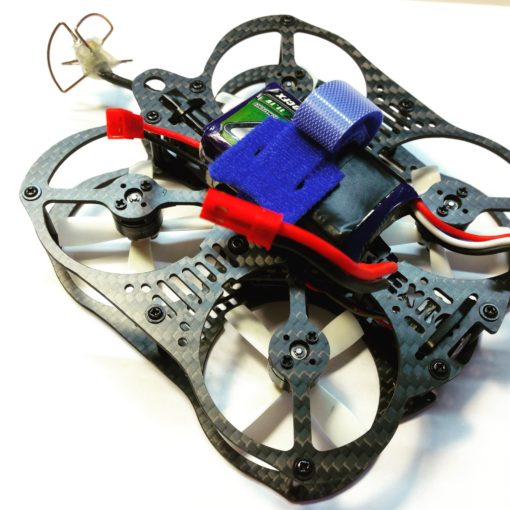
- The quadcopter has been properly built and has a FrSky SBUS receiver installed.
- The user is comfortable navigating the Taranis OpenTX radio menu and buttons.
NOTE: While this guide is specifically written for the Taranis radio, the vast majority of it applies to any radio that can communicate with your flight controller via any protocol. To use another receiver and radio, refer to the setup instructions for that equipment and modify the radio and receiver setup steps in this guide accordingly.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
One thought on “Bare Bones Betaflight Guide: Introduction and Contents”
[…] This guide will not cover the complete Betaflight setup as you can instead refer to the Bare-Bones Betaflight Setup Guide. In addition to the bare bones setup, there are two things to check in Betaflight that are specific […]